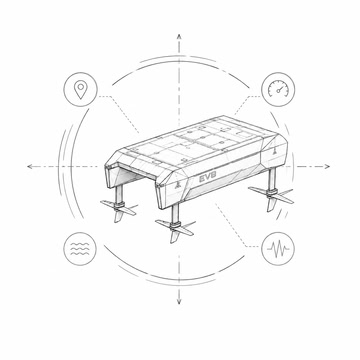
Platform state estimation
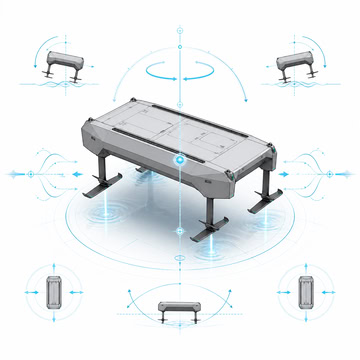
The complex forms a representation of the vessel’s position, motion, and dynamic state.
Eviate is being developed for vessels where motion, platform stability, sensor data quality, and route safety cannot be considered separately. In a foil-borne operating mode, waves, hull dynamics, and actuator loop operation rapidly affect one another.
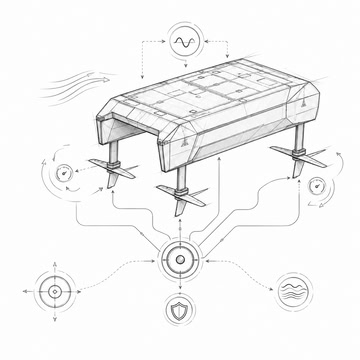
The software-and-hardware complex brings these tasks together in one loop: it estimates platform state, perceives the external environment, forecasts disturbances, supports stabilization, helps plan local motion, detects obstacles, and generates control actions.
The complex forms a representation of the vessel’s position, motion, and dynamic state.
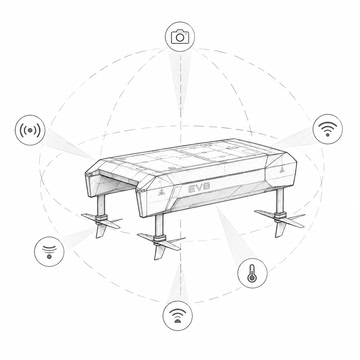
The system collects data from the sensor loop and helps form a picture of the situation around the platform.
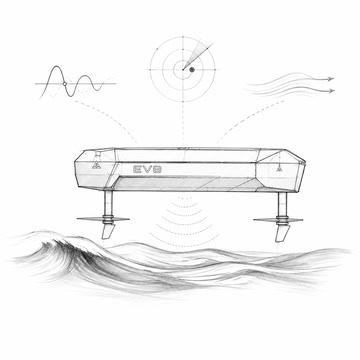
The complex accounts for wave and dynamic factors that may affect motion stability.
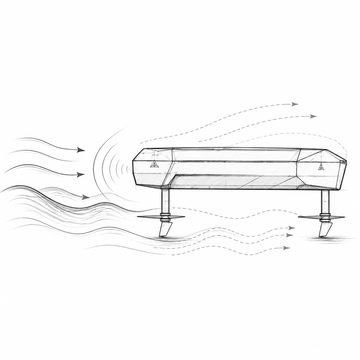
The complex generates stabilizing actions in advance to maintain more stable platform motion.
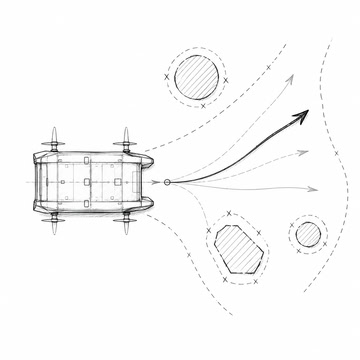
The system helps select the next motion segment with regard to the situation, constraints, and current task.
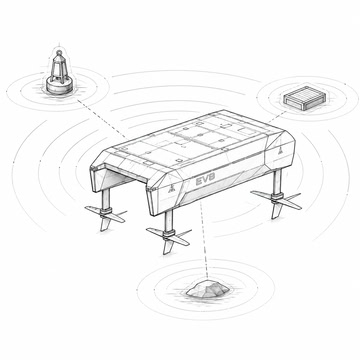
The complex helps identify objects and risk zones in the surrounding environment.

The complex responds to changes in the situation before they develop into a critical condition.
The complex generates coordinated control actions based on vessel state, motion conditions, the target task, and safety constraints.
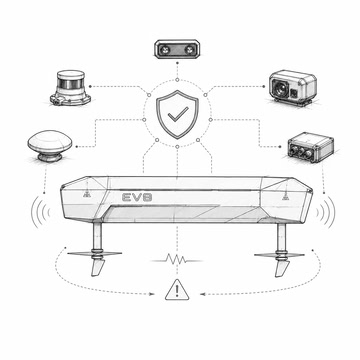
The complex monitors subsystem consistency and helps preserve controllable behavior when the state of individual components changes.

Eviate is being developed for light electric and hybrid hydrofoil vessels / vessels operating in a foilborne mode. The complex is not tied to a single hydrofoil layout: its architecture is designed for different placement options and combinations of hydrofoils within this vessel class.
The core idea of the project is to bring together in one onboard loop what is usually considered separately: vessel motion, stabilization, environment perception, disturbance forecasting, and actuator loop control. For a foil-borne operating mode, this is especially important: platform attitude affects not only stability and safety, but also energy consumption, sensor data quality, and the vessel’s ability to carry out the assigned mission.
A demonstration platform is used to validate the complex. It is not the final product of the project, but a test carrier on which the software-hardware complex can be integrated, configured, and used to verify system behavior under conditions close to real operation.

The target class for Eviate is light electric and hybrid hydrofoil vessels / vessels operating in a foilborne mode.
This is an important constraint. Eviate is not intended as a universal autopilot for any vessel or as a general solution for all electric and hybrid platforms.

Within the target class, different hydrofoil configurations and their combinations may be used. The software-and-hardware complex architecture is designed for this variability.
For the complex, what matters is not one specific layout, but how the platform moves, what constraints it has, and what control actions are available in the current mode.

In a foil-borne operating mode, platform stability, energy efficiency, sensor data quality, and motion safety depend on one another more strongly than in a conventional displacement mode.
Therefore, controlling the route, stabilization, or sensors separately is not sufficient. An onboard complex is needed that links platform state, external disturbances, obstacles, permissible modes, and control actions into one system.
The complex helps the platform maintain controllability when motion is simultaneously affected by waves, speed, maneuvering, and changes in the external situation.
For a light hydrofoil vessel, this is especially important: motion stability is linked to safety, energy consumption, sensor data quality, and the ability to carry out the assigned mission.
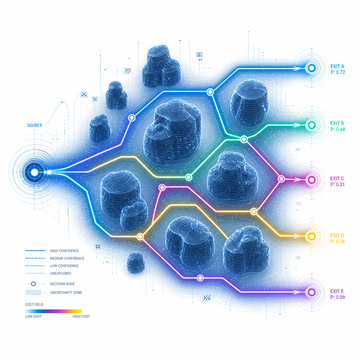
For Eviate, a mission is not just a line on a map. It includes the route, platform state, external situation, motion constraints, and a safe response to changes.
This approach makes it possible to link vessel motion with the real conditions of the water area and the task the platform is carrying out.
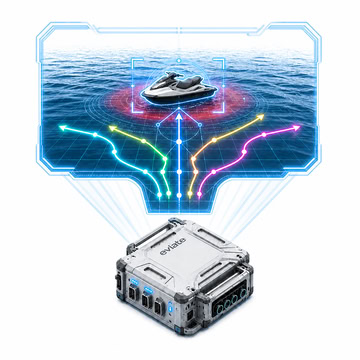
The complex helps identify objects and risk zones that may affect motion or mission execution.
Obstacle detection is linked not only to perception, but also to local planning, forecasting, and generating control actions before a critical situation develops.

Eviate is oriented toward scenarios where motion requires precision: near docks, buoys, hydraulic structures, marinas, port areas, and inland waterways.
In such conditions, stable platform behavior, object detection, careful approach to infrastructure, and safe execution of the next motion segment are important.

Eviate can be used for monitoring, inspection, data collection, route validation, service operations, and pilot trials with light vessels of the target class.
The main value of the complex in such scenarios is to link motion, perception, stabilization, and actuator loop control in one coordinated onboard system.

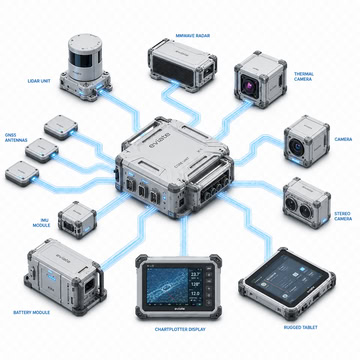
Eviate is built as a unified onboard system in which sensors, state estimation, perception, planning, stabilization, and the actuator loop operate not in isolation, but as connected layers of one control system.
This architecture is needed for a foil-borne operating mode, where a change in platform state is quickly reflected in motion, sensor data quality, and control actions.

The complex accounts not only for the route and motion commands, but also for the current platform state, waves, dynamic disturbances, surrounding objects, and mode constraints.
For Eviate, the platform and water area are treated as an interconnected system: vessel motion, the external situation, and available control actions affect one another.

Stabilization is not built only as a reaction to a deviation that has already occurred. The complex generates actions in advance based on platform state and expected wave or dynamic disturbances.
This makes it possible to link forecasting, state estimation, and the actuator loop into a unified anticipatory control logic.

The mode supervisor monitors subsystem consistency, control-action constraints, and transitions between modes.
If conditions change or individual components operate abnormally, the system must preserve controllable and safe behavior within permissible limits.

To help us understand the context faster, you may specify the organization, area of interest, expected interaction scenario, and preferred way to contact you.
For partnership inquiries, it is useful to briefly describe which water area, platform, scenario, or engineering task you are interested in.
Write to us if you are interested in the project, cooperation, a pilot scenario, an engineering discussion, a publication, or additional information.
If the form is temporarily unavailable, use the contacts provided in this section.